Unit testing data access in ASP.NET Core
Jürgen Gutsch - 15 January, 2019
I really like to be in contact with the dear readers of my blog. I get a lot of positive feedback about my posts via twitter or within the comments. That's awesome and that really pushed me forward to write more posts like this. Some folks also create PRs for my blog posts on GitHub to fix typos and other errors of my posts. You also can do this, by clicking the link to the related markdown file on GitHub at the end of every post.
Many thanks for this kind of feedback :-)
The reader Mohammad Reza recently asked me via twitter to write about unit testing an controller that connects to a database and to fake the data for the unit tests.
@sharpcms Hello jurgen, thank you for your explanation of unit test : Unit Testing an ASP.NET Core Application. it's grate. can you please explain how to use real data from entity framwork and fake data for test in a controller?
@Mohammad: First of all: I'm glad you like this post and I would be proud to write about that. Here it is:
Setup the solution using the .NET CLI
First of all, let's create the demo solution using the .NET CLI
mkdir UnitTestingAspNetCoreWithData & cd UnitTestingAspNetCoreWithData
dotnet new mvc -n WebToTest -o WebToTest
dotnet new xunit -n WebToTest.Tests -o WebToTest.Tests
dotnet new sln -n UnitTestingAspNetCoreWithData
dotnet sln add WebToTest
dotnet sln add WebToTest.Tests
This lines are creating a solution directory adding a web to test and a XUnit test project. Also a solution file gets added and the two projects will be added to the solution file.
dotnet add WebToTest.Tests reference WebToTest
This command won't work in the current version of the .NET Core, because the XUnit project still targets netcoreapp2.2. You cannot reference a higher target version. It should be equal or lower than the target version of the referencing project. You should change the the target to netcoreapp3.0 in the csproj of the test project before executing this command:
<TargetFramework>netcoreapp3.0</TargetFramework>
Now we need to add some NuGet references:
dotnet add WebToTest package GenFu
dotnet add WebToTest.Tests package GenFu
dotnet add WebToTest.Tests package moq
At first we add GenFu, which is a dummy data generator. We need it in the web project to seed some dummy data initially to the database and we need it in the test project to generate test data. We also need Moq to create fake objects, e.g. fake data access in the test project.
Because the web project is an empty web project it also doesn't contain any data access libraries. We need to add Enitity Framework Core to the project.
dotnet add WebToTest package Microsoft.EntityFrameworkCore.Sqlite -v 3.0.0-preview.18572.1
dotnet add WebToTest package Microsoft.EntityFrameworkCore.Tools -v 3.0.0-preview.18572.1
dotnet add WebToTest package Microsoft.AspNetCore.Diagnostics.EntityFrameworkCore -v 3.0.0-preview.18572.1
I'm currently using the preview version of .NET Core 3.0. The version number will change later on.
Now we can start Visual Studio Code
code .
In the same console window we can call the following command to execute the tests:
dotnet test WebToTest.Tests
Creating the controller to test
The Controller we want to test is an API controller that only includes two GET actions. It is only about the concepts. Testing additional actions, POST and PUT actions is almost the same. This is the complete controller to test.
using System.Collections.Generic;
using System.Linq;
using System.Threading.Tasks;
using Microsoft.AspNetCore.Mvc;
using WebToTest.Data.Entities;
using WebToTest.Services;
namespace WebToTest.Controllers
{
[Route("api/[controller]")]
[ApiController()]
public class PersonController : Controller
{
private readonly IPersonService _personService;
public PersonController(IPersonService personService)
{
_personService = personService;
}
// GET: api/Person
[HttpGet]
public IEnumerable<Person> GetPersons()
{
return _personService.AllPersons();
}
// GET: api/Person/5
[HttpGet("{id}")]
public ActionResult<Person> GetPerson(int id)
{
var todoItem = _personService.FindPerson(id);
if (todoItem == null)
{
return NotFound();
}
return todoItem;
}
}
}
As you can see, we don't use entity framework directly in the controller. I would propose to encapsulate the data access in service classes, which prepare the data as you need it.
Some developers prefer to encapsulate the actual data access in an additional repository layer. From my perspective this is not needed, if you use an OR mapper like Entity Framework. One reason is that EF already is the additional layer that encapsulates the actual data access. And the repository layer is also an additional layer to test and to maintain.
So the service layer contains all the EF stuff and is used here. This also makes testing much easier because we don't need to mock the EF DbContext. The Service gets passed in via dependency injection.
Let's have a quick look into the Startup.cs where we need to configure the services:
public void ConfigureServices(IServiceCollection services)
{
// [...]
services.AddDbContext<ApplicationDbContext>(options =>
options.UseSqlite(Configuration.GetConnectionString("DefaultConnection")));
services.AddTransient<IPersonService, PersonService>();
services.AddMvc().SetCompatibilityVersion(CompatibilityVersion.Version_2_2);
}
What I added to the ConfigureServices method is one line to register and configure the DbContext and one line to register the PersonService used in the controller. Both types are not created yet. Before we create them we also need to add a few lines to the config file. Open the appsettings.json and add the connection string to the SQLite database:
{
"ConnectionStrings": {
"DefaultConnection": "DataSource=app.db"
},
// [...]
}
That's all about the configuration. Let's go back to the implementation. The next step is the DbContext. To keep the demo simple, I just use one Person entity here:
using GenFu;
using Microsoft.EntityFrameworkCore;
using WebToTest.Data.Entities;
namespace WebToTest.Data
{
public class ApplicationDbContext : DbContext
{
public ApplicationDbContext(DbContextOptions<ApplicationDbContext> options)
: base(options)
{}
public ApplicationDbContext() { }
protected override void OnModelCreating(ModelBuilder modelBuilder)
{
// seeding
var i = 1;
var personsToSeed = A.ListOf<Person>(26);
personsToSeed.ForEach(x => x.Id = i++);
modelBuilder.Entity<Person>().HasData(personsToSeed);
}
public virtual DbSet<Person> Persons { get; set; }
}
}
We only have one DbSet of Person here. In the OneModelCreating method we use the new seeding method HasData() to ensure we have some data in the database. Usually you would use real data to seed to the database. In this case I use GenFu do generate a list of 26 persons. Afterwards I need to ensure the IDs are unique, because by default GenFu generates random numbers for the ids which may result in a duplicate key exception.
The person entity is simple as well:
using System;
namespace WebToTest.Data.Entities
{
public class Person
{
public int Id { get; set; }
public string FirstName { get; set; }
public string LastName { get; set; }
public DateTime DateOfBirth { get; set; }
public string City { get; set; }
public string State { get; set; }
public string Address { get; set; }
public string Telephone { get; set; }
public string Email { get; set; }
}
}
Now let's add the PersonService which uses the ApplicationDbContext to fetch the data. Even the DbContext gets injected into the constructor via dependency injection:
using System.Collections.Generic;
using System.Linq;
using System.Threading.Tasks;
using Microsoft.EntityFrameworkCore;
using WebToTest.Data;
using WebToTest.Data.Entities;
namespace WebToTest.Services
{
public class PersonService : IPersonService
{
private readonly ApplicationDbContext _dbContext;
public PersonService(ApplicationDbContext dbContext)
{
_dbContext = dbContext;
}
public IEnumerable<Person> AllPersons()
{
return _dbContext.Persons
.OrderBy(x => x.DateOfBirth)
.ToList();
}
public Person FindPerson(int id)
{
return _dbContext.Persons
.FirstOrDefault(x => x.Id == id);
}
}
public interface IPersonService
{
IEnumerable<Person> AllPersons();
Person FindPerson(int id);
}
}
We need the interface to register the service using a contract and to create a mock service later on in the test project.
If this is done, don't forget to create an initial migration to create the database:
dotnet ef migrations add Initial -p WebToTest -o Data\Migrations\
This puts the migration into the Data folder in our web project. No we are able to create and seed the database:
dotnet ef database update -p WebToTest
In the console you will now see how the database gets created and seeded:
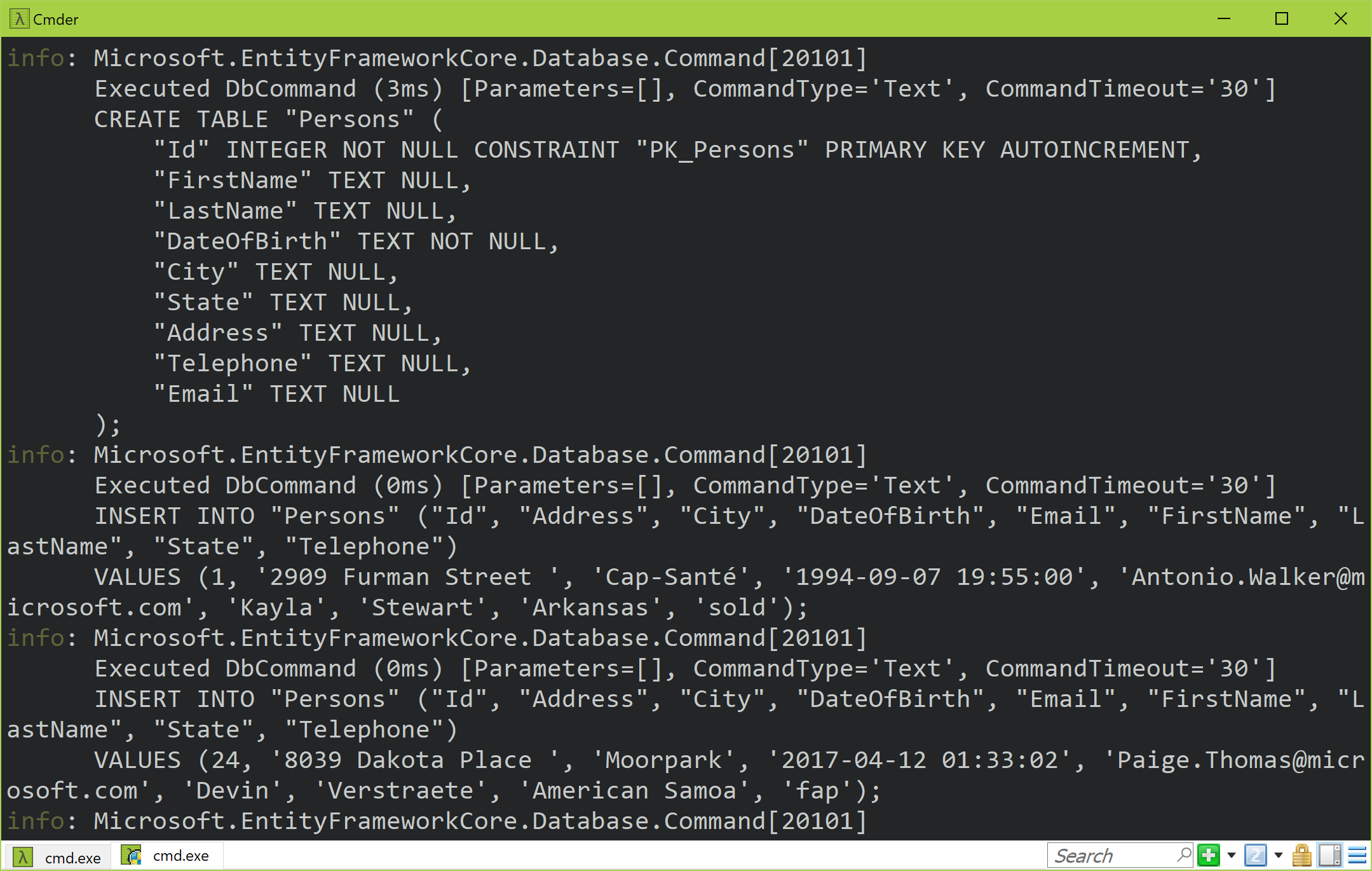
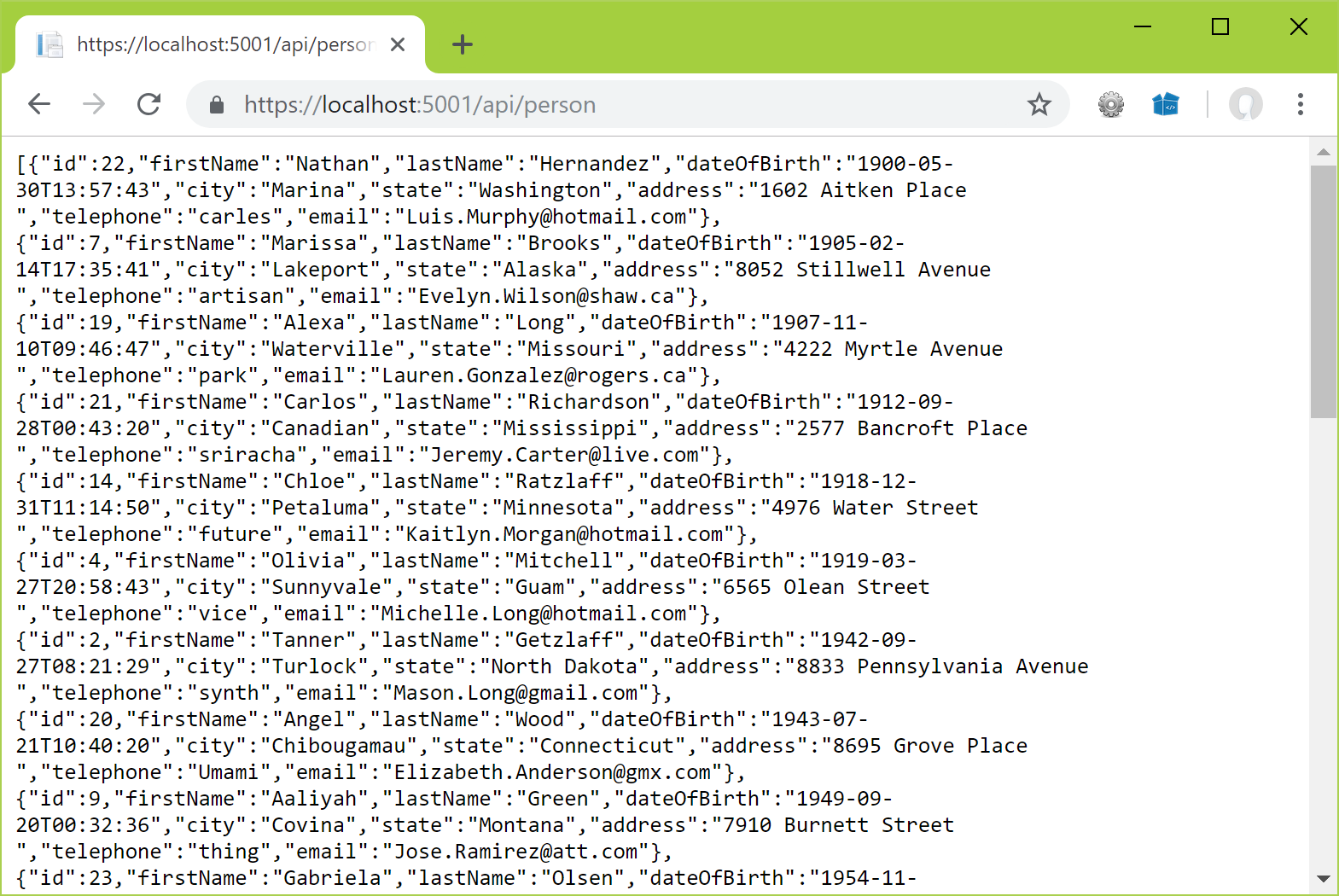
Now the web project is complete and should run. You can try it by calling the following command and calling the URL https://localhost:5001/api/person in the browser:
dotnet run -p WebToTest
You now should see the 26 persons as JSON in the browser:
Testing the controller
In the test project I renamed the initially scaffolded class to PersonControllerTests. After that I created a small method that creates the test data we'll return to the controller. This is exactly the same code we used to seed the database:
private IEnumerable<Person> GetFakeData()
{
var i = 1;
var persons = A.ListOf<Person>(26);
persons.ForEach(x => x.Id = i++);
return persons.Select(_ => _);
}
We now can create out first test to test the controllers GetPersons() method:
[Fact]
public void GetPersonsTest()
{
// arrange
var service = new Mock<IPersonService>();
var persons = GetFakeData();
service.Setup(x => x.AllPersons()).Returns(persons);
var controller = new PersonController(service.Object);
// Act
var results = controller.GetPersons();
var count = results.Count();
// Assert
Assert.Equal(count, 26);
}
In the first line we use Moq to create a mock/fake object of our PersonService. This is why we need the interface of the service class. Moq creates proxy objects out of interfaces or abstract classes. Using Moq we are now able to setup the mock object, by telling Moq we want to return this specific list of persons every time we call the AllPersons() method.
If the setup is done we are able to inject the proxy object of the IPersonService into the controller. Our controller now works with a fake service instead using the original one. Inside the unit test we don't need a connection to the database now. That makes the test faster and more independent from any infrastructure outside the code to test
In the act section we call the GetPersons() method and will check the results afterwards in the assert section.
How does it look like with the GetPerson() method that returns one single item?
The second action to test returns an ActionResult of Person, so we only need to get the result a little bit different:
[Fact]
public void GetPerson()
{
// arrange
var service = new Mock<IPersonService>();
var persons = GetFakeData();
var firstPerson = persons.First();
service.Setup(x => x.FindPerson(1)).Returns(firstPerson);
var controller = new PersonController(service.Object);
// act
var result = controller.GetPerson(1);
var person = result.Value;
// assert
Assert.Equal(1, person.Id);
}
Also the setup differs, because we setup another method that returns a single Person instead of a IEnumerable of Person.
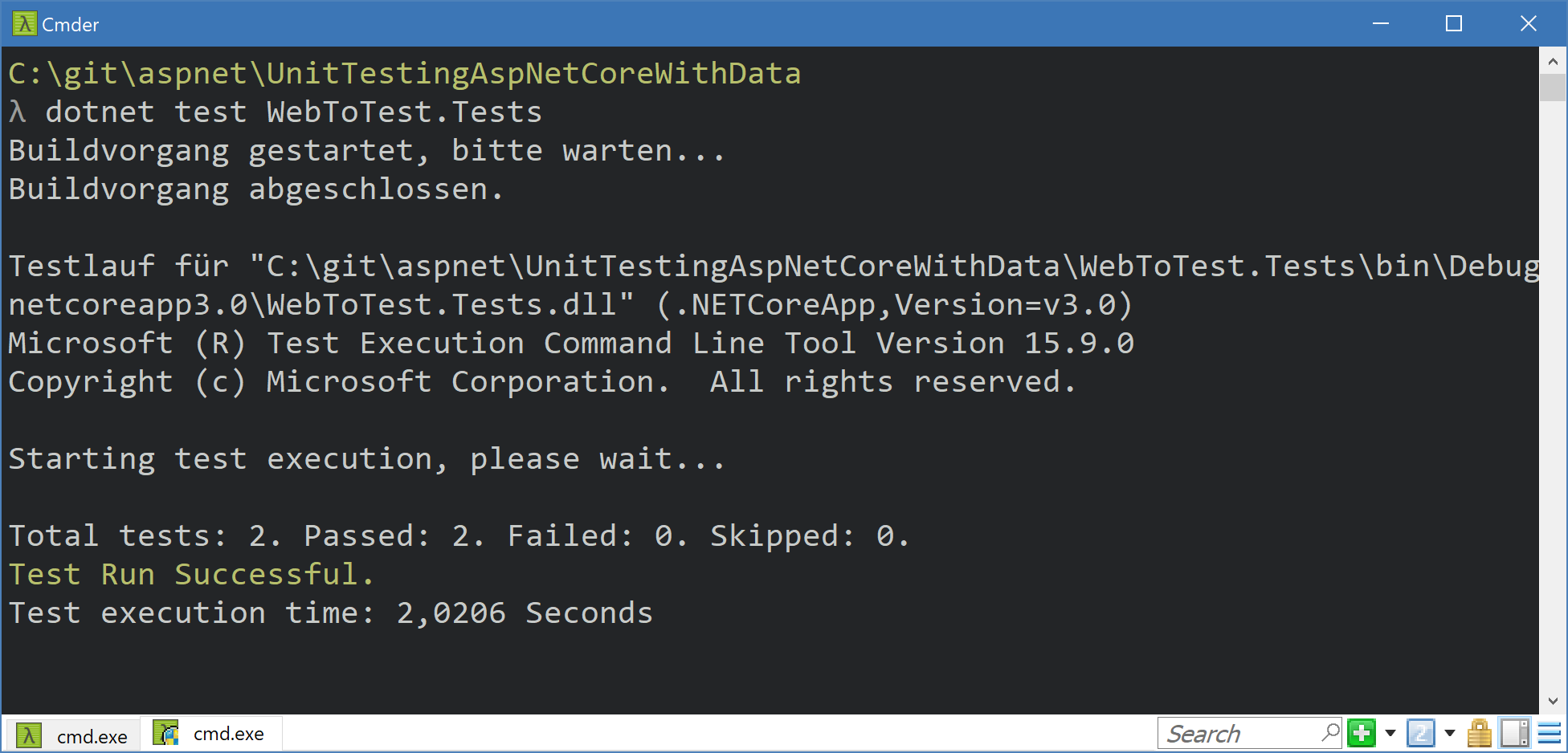
To execute the tests run the next command in the console:
dotnet test WebToTest.Tests
This should result in the following output if all is done right:
Testing the service layer
How does it look like to test the service layer? In that case we need to mock the DbContext to feed the service with fake data.
In the test project I created a new test class called PersonServiceTests and a test method that tests the AllPersons() method of the PersonService:
[Fact]
public void AllPersonsTest()
{
// arrange
var context = CreateDbContext();
var service = new PersonService(context.Object);
// act
var results = service.AllPersons();
var count = results.Count();
// assert
Assert.Equal(26, count);
}
This looks pretty simple at the first glance, but the magic is inside the method CreateDbContext, which created the mock object of the DbContext. I don't return the actual object, in case I need to extend the mock object in the current test method. Let's see how the DbContext is created:
private Mock<ApplicationDbContext> CreateDbContext()
{
var persons = GetFakeData().AsQueryable();
var dbSet = new Mock<DbSet<Person>>();
dbSet.As<IQueryable<Person>>().Setup(m => m.Provider).Returns(persons.Provider);
dbSet.As<IQueryable<Person>>().Setup(m => m.Expression).Returns(persons.Expression);
dbSet.As<IQueryable<Person>>().Setup(m => m.ElementType).Returns(persons.ElementType);
dbSet.As<IQueryable<Person>>().Setup(m => m.GetEnumerator()).Returns(persons.GetEnumerator());
var context = new Mock<ApplicationDbContext>();
context.Setup(c => c.Persons).Returns(dbSet.Object);
return context;
}
The DbSet cannot be easily created, it is a bit special. This is why I need to mock the DbSet and to setup the Provider, the Expression the ElementType and the Enumerator using the values from the persons list. If this is done, I can create the ApplicationDbContext mock and setup the DbSet of Person on that mock. For every DbSet in your DbContext you need to add this four special setups on the mock DbSet. This seems to be a lot of overhead, but it is worth the trouble to test the service in an isolated way.
Sure you could use a in memory database with a real DbContext, but in this case the service isn't really isolated and and we anyway have a kind of a unit test.
The second test of the PersonService is pretty similar to the first one:
[Fact]
public void FindPersonTest()
{
// arrange
var context = CreateDbContext();
var service = new PersonService(context.Object);
// act
var person = service.FindPerson(1);
// assert
Assert.Equal(1, person.Id);
}
Let's run the tests and see if it's all working as expected:
dotnet test WebToTest.Tests
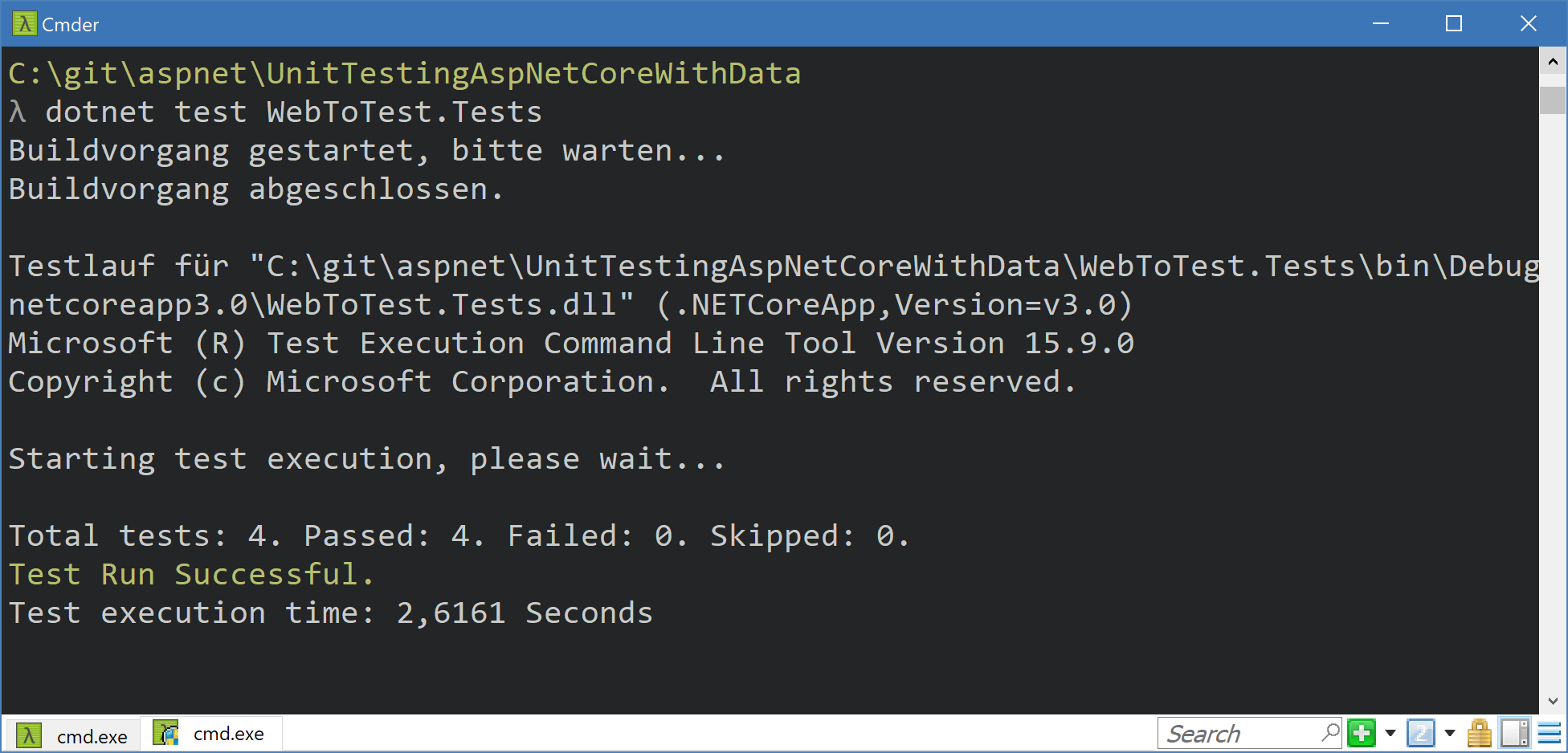
Also this four tests passed.
Summary
In this tutorial the setup took the biggest part, just to get a running API controller that we can use to test.
- We created the solution in the console using the .NET CLI.
- We added a service layer to encapsulate the data access.
- We added a EF DbContext to use in the service layer.
- We registered the services and the DbContext in the DI.
- We used the service in the controller to create two actions which return the data.
- We started the application to be sure all is running fine.
- We created one test on an action that doesn't return an ActionResult
- We created another test on an action that returns an ActionResult
- We ran the tests successfully in the console using the .NET CLI
Not using the DbContext in the Controller directly makes it a lot easier to test the controller by passing in a mock service. Why? Because it is easier to fake the service instead of the DbContext. It also keeps the controller small which makes maintenance a lot easier later on.
Faking the DbContext is a bit more effort, but also possible as you saw in the last section.
Please find the complete code sample her on GitHub: https://github.com/JuergenGutsch/unit-testing-aspnetcore3
Conclusion
@Mohammad I hope this post will help you and answer your questions :-)
Using ASP.NET Core there is no reason not to unit test the most important and critical parts of your application. If needed you are able to unit test almost all in your ASP.NET Core application.
Unit test is no magic but it is also not the general solution to ensure the quality of your app. To ensure that all tested units are working together you definitely need to have some some integration tests.
I'll do another post about integration tests using ASP.NET Core 3.0 soon.